The Problem
Seagulls are both a pest and protected animal in the Netherlands. Unfortunately seagulls often choose to nest in buildings. They are smart animals that quickly detect unnatural movements of a scarecrow and are known for ignoring it to the point that they build their nest on top of it.
The client wanted a way to prevent seagulls from nesting on certain rooftops without harming the birds in anyway.
The Project
The project was to create a lifelike robot that was able to scare away seagulls to avoid them from brooding on rooftops. Foxes are a known hazard to seagulls, and a robot with fox form and behaviour was selected as the proposed solution. The robot characteristics were
- High levels of security, not falling of the roof
- Chasing of seagulls but not people inspecting the roof
- Patrolling the roof area but only speeding up in the direction of a seagull
- Finding its protected area when the batteries were getting low and when night falls.
In order for the project to be financially viable the behavior needed to be trained without having to retrain it for every new building.
The Solution
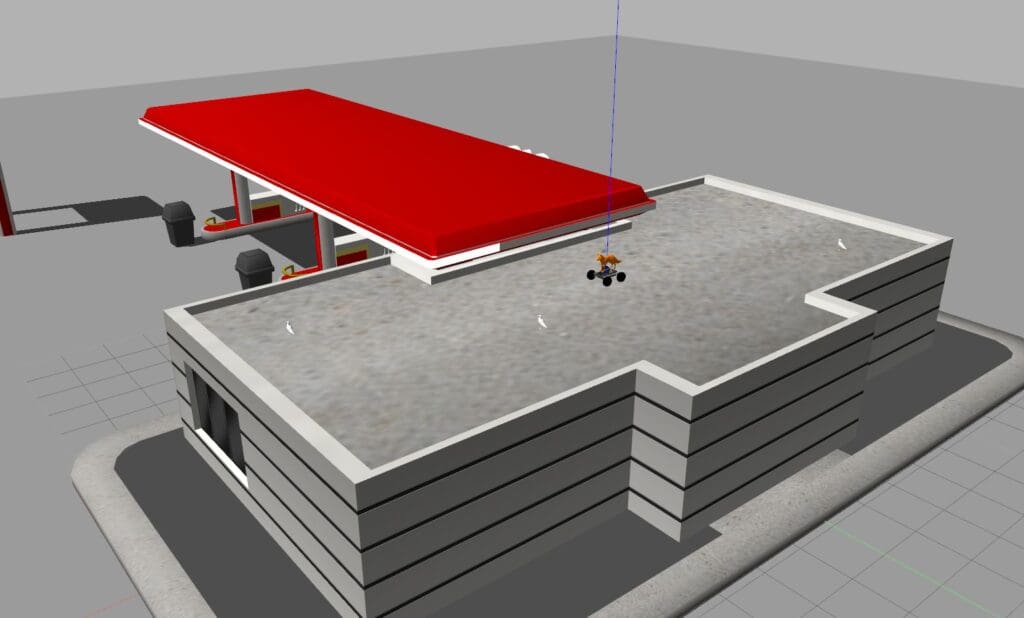
The robot’s control system was developed against an early Asimovo version for simulations.
A combination of cameras and ultrasonic sensors were used as feeds for the SLAM algorithm to build and navigate the roof.
The inputs of the cameras were processed using libraries such as openCV to get rid of vibrations in the video feeds. After that the moving element of the feeds were identified and classified against a neural network that recognized birds.
A security layer was added to the robot that could stop the robot directly when the ultrasonic sensors found that the device was too close to the edge of the roof.
The robot started to look for its weather protected chargepoint when the battery reached a level of 25%, when it was too windy, or at certain times of day.
The Outcome
Whether it is having a home for the project, to keep a client up to date of progress and key milestones. Or being able to run many training simulations in parallel. The Asimovo team knows what tools and steps your need to develop high performing robots.
Many robots, doing new tasks and complex missions need bespoke training environments and training simulations. The team at Asimovo have experience with these types of projects and have built that functionality into the platform to benefit all users.
Highlights
- Simulation used to develop high level controls
- Real sensor data fed back into the simulation training cycle
- Helped provide data to prove the business case as well as technical feasibility
Key PArtners
Key tools used
openCV
Gazebo Classic
ROS
Simulation environment & Scenarios
Custom-built environment
Physics based model
Customized scenario planning