Connecting robotics developers to professional tools and resources
Robotics development can be slow and frustrating
Cloud computing has its drawbacks, particularly for robotics web tools. Despite these limitations, its benefits for collaboration and resource access are undeniable. To accelerate robotics, developers need more than code sharing.
There has to be a smarter way to develop and test robots.
Robtics is no longer just mechatronics and hardware, it is complex behaviour building, iterative simulation and data processing. Robotics combines skills across all engineering and scientific disciplines – from AI and ML to Industrial Automation to Areospace
Embrace the benefits of Cloud Computing in combination with native robotics tools. Work seamlessly between cloud and native IDEs.
There is now a smarter way to develop and test robots.
Asimovo have listened closely to the needs of robotics developers and teams. We have built a platform to empower robotics development, not constrain it.
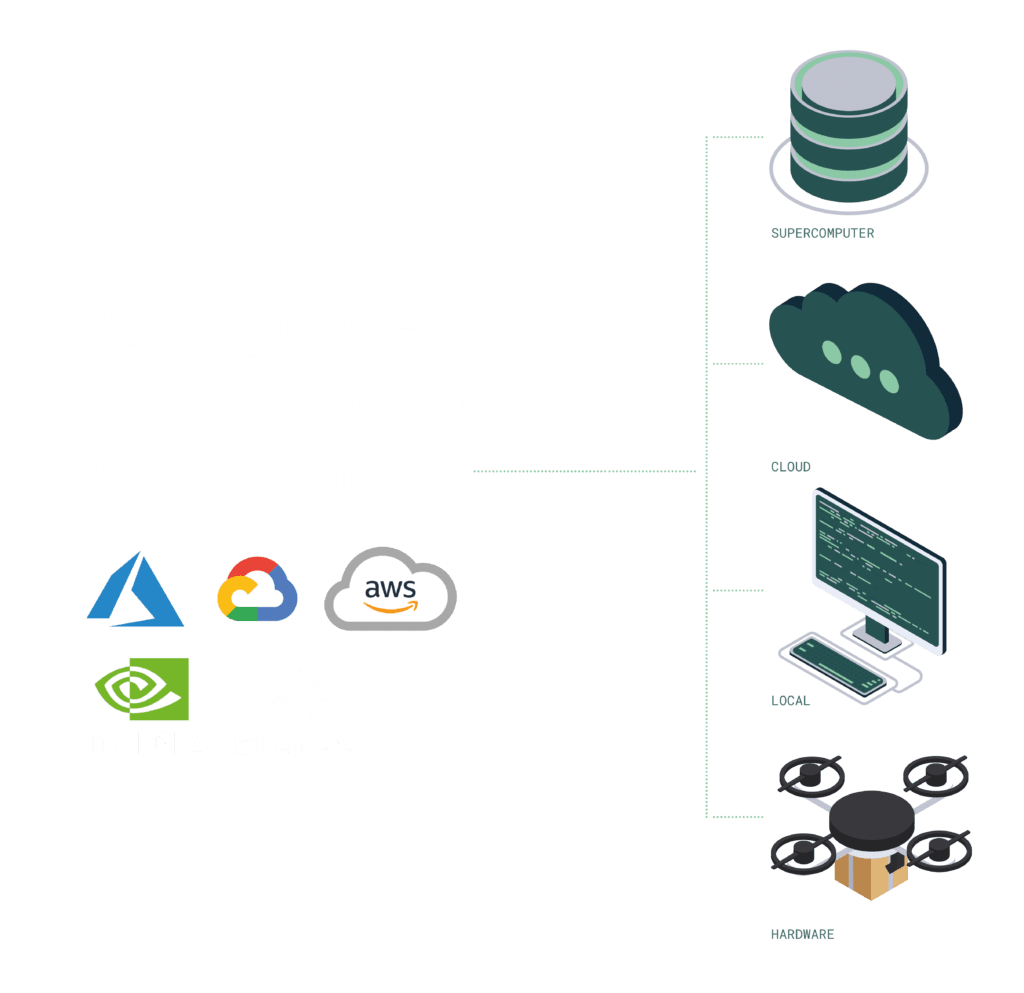
We have combined the benefits of the cloud (remote collaboration and processing resources) to Integrated Development Environments (IDEs) and the robotics development toolkit.
Empowering a Software First approach to robotics that embraces an iterative development and testing cycle
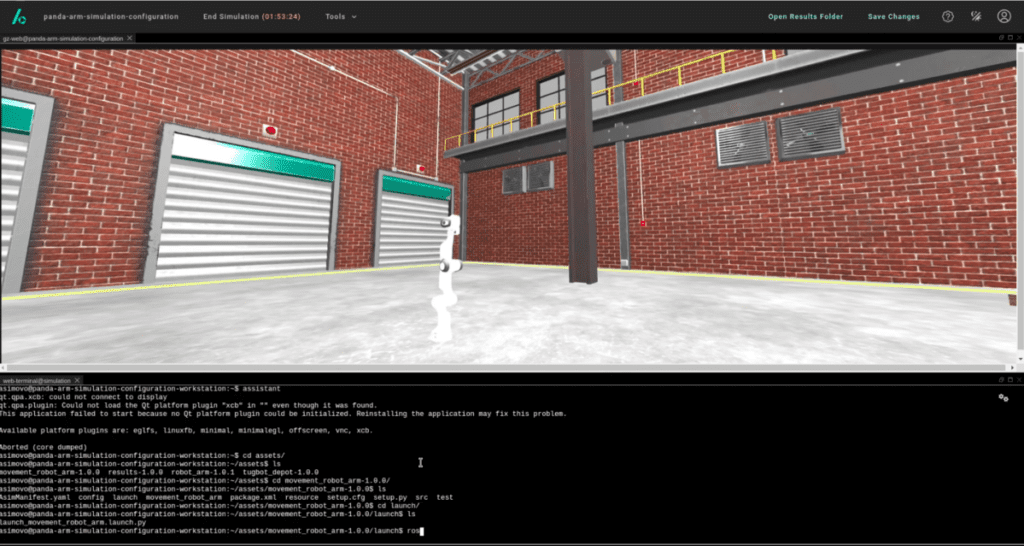
This project has a robot arm located in a warehouse deli world. Here you can try moving the robot arm around and adding new functionality for picking and placing different items.
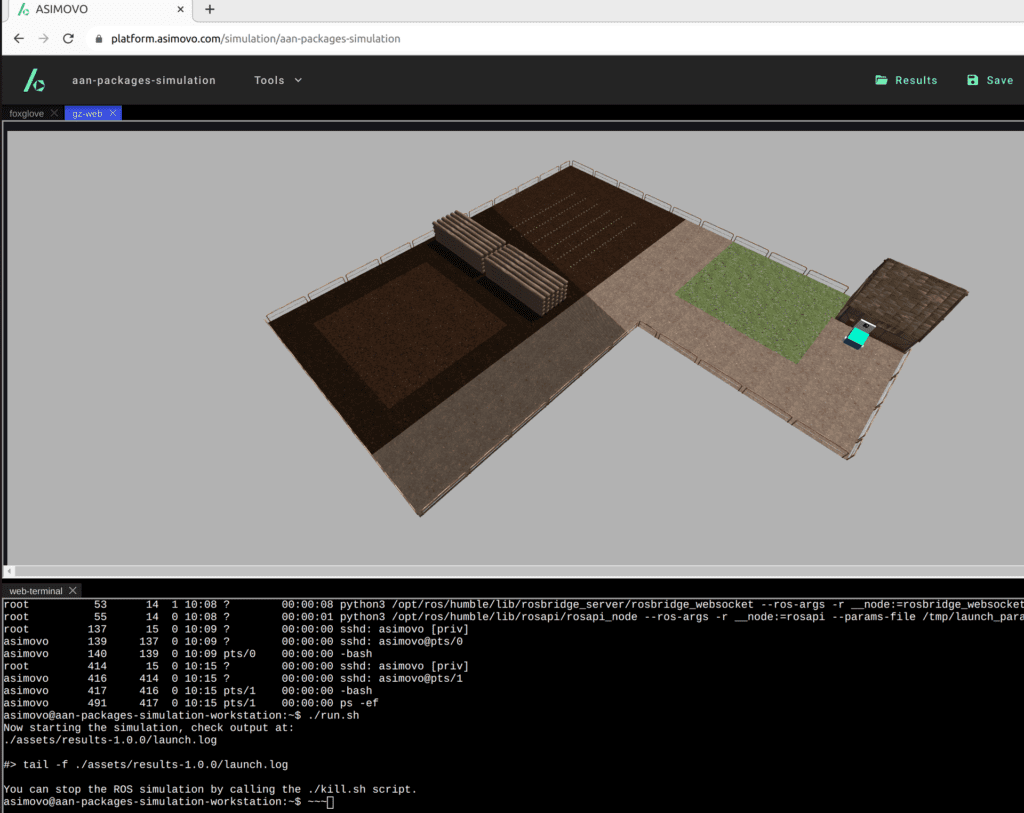
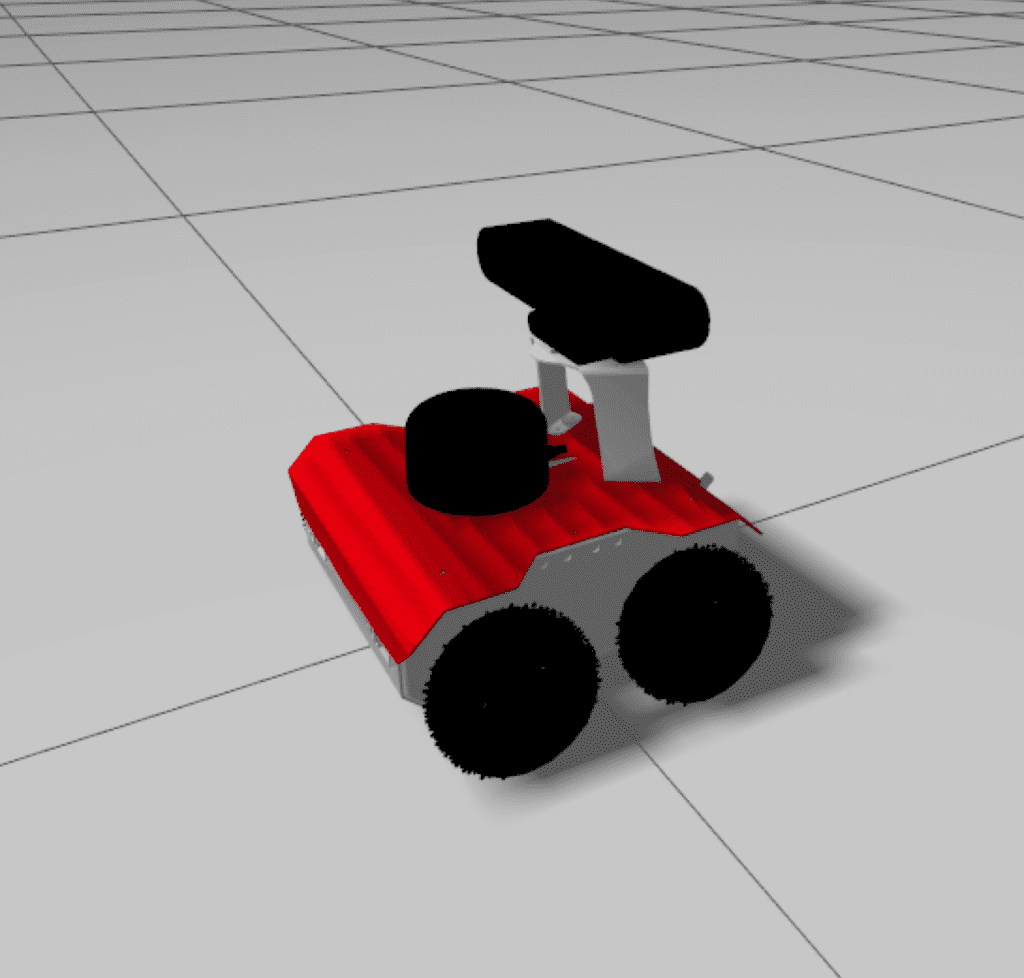
The AAN project stands for Autonomous Agricultural Navigation. A research project coordinated by Saxion Applied university and 5 partners. Try navigating the Agricultural robot around and back to its docking station to charge.
Ignition Drone in the Fortress world project
This project is to help you control drone movements within a more advanced testing environment. Try to avoid the obstacles in the world and not crash the drone
Multiple Rovers in a Maze: This project is for you to try simple navigation. However as there are two different rovers, spawned separately you can also test having multiple people control the robots from different machines. It might be more fun to race!
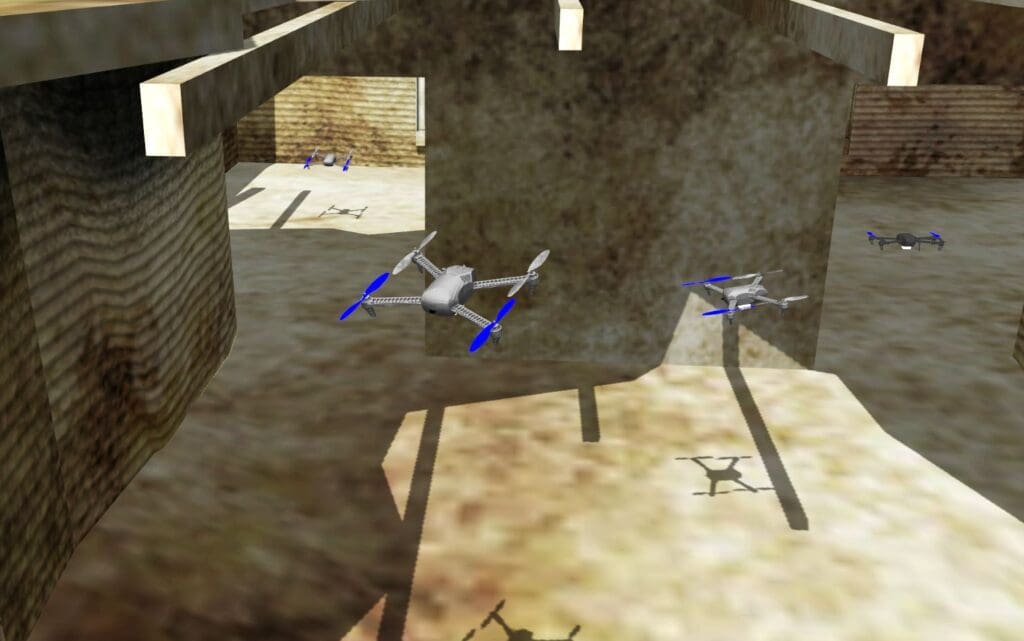
Multi-drone Project: This project includes multiple PX4 drones operating in a simple world. Early behaviour components for reinforcement learning are available
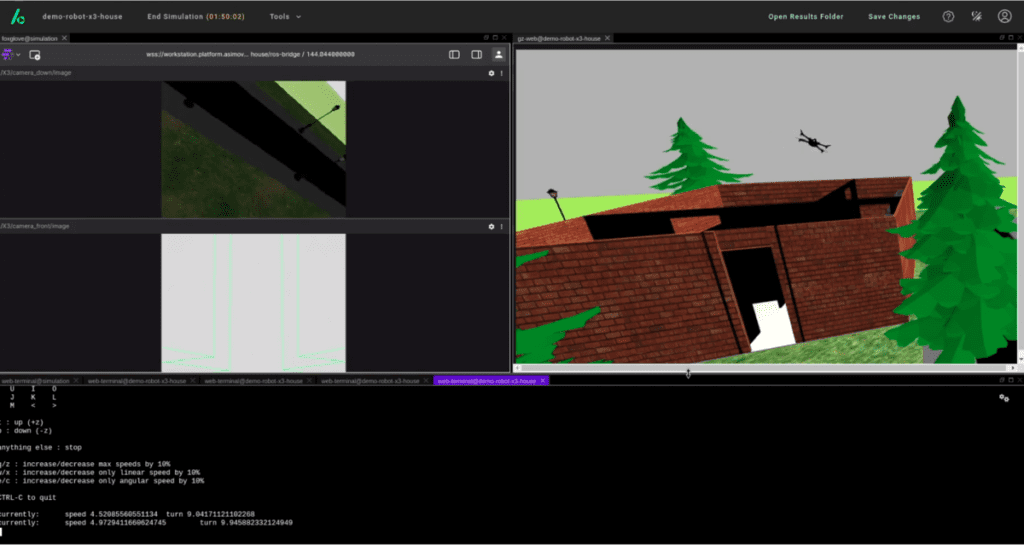
The developer case study covers the detailed steps you need to take to set up a project, run a simulation, control and navigate a ROSbot, and launch the system.
This AAN project developer case study is a great place to get started if you are interested in creating high level control systems.
You can immediately begin to understand how to structure your project in a modular way to optimise it for collaboration and sharing.
An example of how HIL solutions can be set up and worked on using the Asimovo platform. Furthermore, you can use this project to gain information on how to interface ROS1 robots with ROS2 systems. The operating system of the robot runs ROS1 Noetic, while the other software in this solution is implemented with the use of ROS2 Foxy packages.
This project was created using the Husarion ROSbot 2, ROS2 Foxy, Gazebo Fortress and the Asimovo platform.
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.