High Intensity Drone Traffic: A bottom-up approach to traffic rules
The Problem
Today drones are treated as if they were small airplanes, and should work with an all knowing controller. In the future there will be millions of drones flying around our cities, and air traffic control protocols will not be optimal for managing their behaviour.
When you cross the square in front of Rotterdam Central Station, you are sharing that space with hundreds of other pedestrians. People make it to the other side without collisions, even though there is no air traffic control to help them. How does that work? As a human being you have been trained in avoiding collisions with others and to interpret and align your movements with others.
The Project
Could a different approach be taken? Create an environment in which drones can learn to behave like humans. That is to say: “fly in a busy area with a clear mission but without hitting each other”.
The Solution
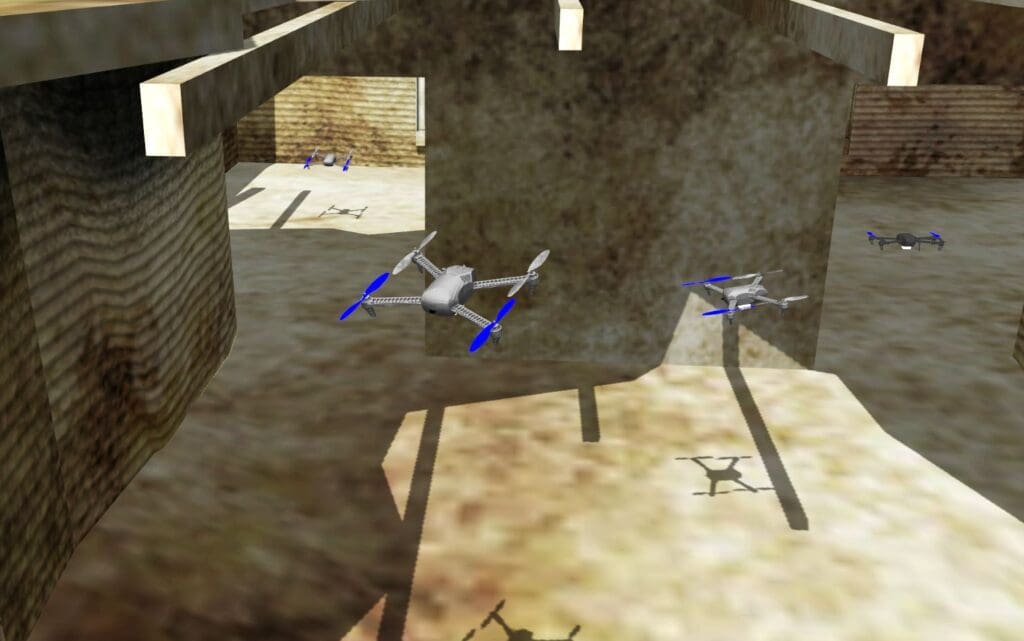
Veronika, a robotics engineer in the Asimovo team, identified the need for scalable infrastructure. The project required the ability to endlessly create, mix and repeat scenarios. She created an environment in which drones can learn to behave to fly in a busy area with a clear mission but without hitting each other.
Many different missions for multiple drones were created. Reinforcement learning was used to train the high level behaviour of the drones. After running a scenario its output can be used as input for the next. Obviously training this behavior has made a lot of drones crash, but since they only live in a simulated world the only cost was a bit of computing time. The results will not replace the primacy of the aviation paradigm tomorrow but is an important step in solutions that work even when there is no oversight.
The Outcome
Using simultaneous simulations is the only cost and time effective way of developing these types of complex behaviours. The Asimovo team have experience in developing protocols, scenarios and environments for these complex training projects. The assets, tools and features available within the Asimovo platform can be used to help develop similar use cases without having to start everything again from scratch.
Highlights
Multiple drones in the same simulation environment
Develop the high level controls using reinforcement learning
Multiple simulations in parallel to discover the optimal behaviour
ROS and custom built Gazebo environment
Key PArtners
Key tools used
PX4 SITL Gazebo Classic ROS / ROS2
Simulation environment & Scenarios
Custom-built environment Physics based model Customized scenario planning
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.