Cooperative Robot Planning: Operating in emergency conditions
The Problem
Hazardous situations and emergency conditions often occur in environments where communication is limited such as in tunnels, underwater, or unsafe structures. In these use cases the energy needed for high speed connectivity limits the range of an Autonomous robots (UxV’s ) even further. This limits the use of UxV-s unless there is another way they could operate.
The Project
The Asimovo team has worked on solving this problem in two different projects. In both projects the UxV could only communicate with each other if they were “close” to each other. With the communication speed quickly dropping to zero when distances became larger.
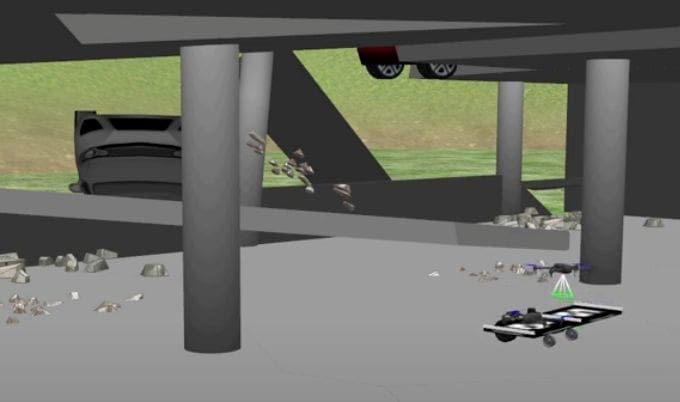
In one project, an emergency scenario was simulated. A collapsed multi-storey carpark simulation environment was created, in which a combination of rovers and drones could be trained to do the initial investigation and inspection.
The Solution
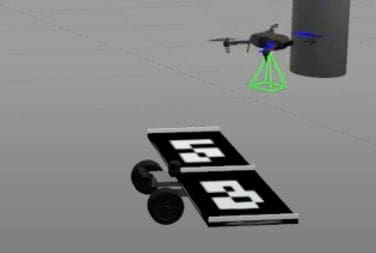
Being able to simulate the complex environments and conditions was important in being able to train the behaviour and reinforce the learning. Different combinations of robot types (rovers and drones) were used together for optimal behaviour.
The research showed that a clear definition of the mission for the swarm was needed. A concise protocol to share updates in the environment and progress of the mission makes it possible to reach high levels of efficiency when compared to perfect communication conditions. Even going as high as 70%
For this research a high number of scenarios was executed in Asimovo with different numbers of UxV-s and communication conditions.
The Outcome
Using simulation as an integrated part of your development is the best way to develop complex control systems.
The Asimovo team have experience in developing protocols, scenarios and environments for these complex training projects. The assets, tools and features available within the Asimovo platform, and libraries, can be used to help develop similar use cases without having to start everything again from scratch.
Highlights
Multiple different robots communicating in the same simulation
Multiple simulations to develop high level control
Some custom built simulations due to limitations in the existing ROS toolkit
Increased communication effectiveness due to collaborative behaviours
Key PArtners
Key tools used
Imported CAD model Gazebo Classic ROS
Simulation environment & Scenarios
Custom-built environment Physics based model Customized scenario planning
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.