The Problem
AquaSmartXL (ASXL) is a small and highly innovative developer of inspection solutions from The Netherlands. In recent years they have developed a number of devices that all concentrate on different types of water based inspections (floor, walls, installations and now poles). The Wickie, is a robot that can inspect poles both above and below water. Compared to diver and climber based inspections it has the advantages of safety, speed and repeatability. However help was needed to understand the behaviour and train the hardware.
The Project
The mechanical structure of the Wickie was almost done when the Asimovo team was asked to join the project. However a couple of questions remained
- How to create an automated gait up and down?
- How to connect the mission; inspection with multiple sensors, to the right place on the pole?
- How to update the Wickie once operational?
The Solution
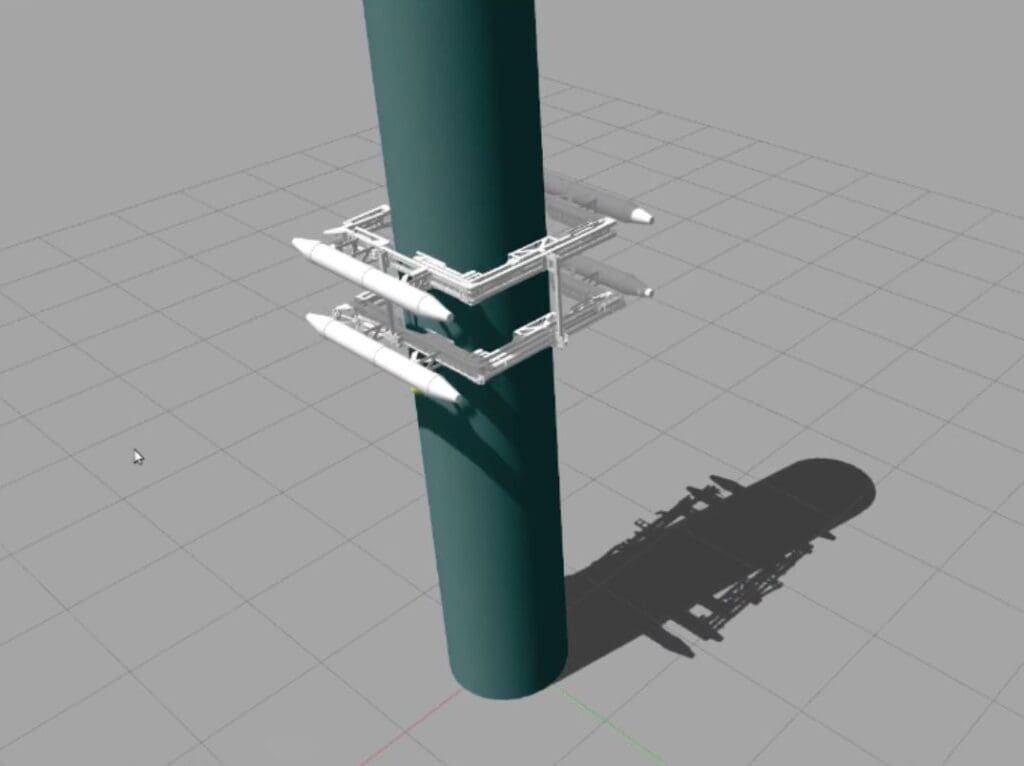
The Asimovo team created a simple digital twin. The robot climbs a pole similar to a lumberjack climbing a tree. It hugs either the upper set of arms or the lower set of arms and then extends its legs moving the unhugged arms. By repeating these movements a gait is created.
First this movement was tested by creating a control system based on the digital twin. This ROS based control system was then moved onto a control board. The next step was to test each of the motors needed to achieve movement. Since no standard ROS device driver for this type of engine existed it was developed and tested by the team using the hardware in the loop features of Asimovo. The robot was then successfully tested in water.
The control board is powerful enough to hold a containerized version of ROS that can be kept up to date through a single project environment in Asimovo. This approach allows operational Wickie’s to receive software updates and share operational data.
The Outcome
Functionality in the Asimovo platform has been built to support these types of development projects. Making it a simple and affordable option to bring simulation into the early stages of your development and build functionality that stays with the project into production. It is optimised to help you build autonomy into your robots.
The result is that if you market a device that is either mechanical or digital and not autonomous you should take a look at what Asimovo can offer you.
The result is that if you market a device that is either mechanical or digital and not autonomous you should take a look at what Asimovo can offer you.

Highlights
- Simple digital twin
- ROS based control system
- Hardware in the loop
- Faster time to market using simulation
Key PArtners

Key tools used
Imported CAD model
Gazebo Classic
ROS
Simulation environment & Scenarios
Custom-built environment
Physics based model
Customized scenario planning